PIC: MPU6050


GY-521
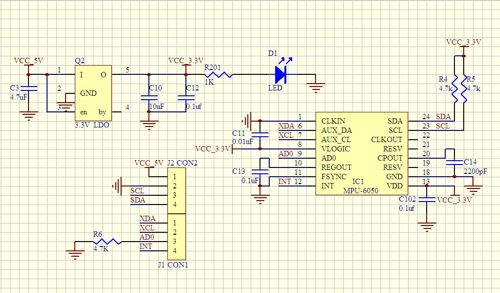
MPU6050 é um sensor de 6-eixos, contento um acelerômetro de 3-eixos e um giroscópio de 3-eixos. Opera com 3.3V e se comunica vis I2C com velocidade máxima de 400Khz.
A leitura dos dados é fácil. O modo Sleep deve ser desativado, em seguida, os registros para o acelerômetro e giroscópio podem ser lidos.
PINOS:
| VCC | 5V |
| GND | 0V |
| SCL | Clock |
| SDA | Dados |
| XDA | Dados ( Para algum outro sensor conectado ) |
| XCL | Clock ( Para algum outro sensor conectado ) |
| AD0 | Bit0 do endereço I2C |
| INT | Pino de interrupção |
BIBLIOTECA
MikroC PRO PIC
#ifdef USE_MPU6050_SOFT_I2C
#define MPU6050_I2C_Wr Soft_I2C_Write
#define MPU6050_I2C_Rd Soft_I2C_Read
#define MPU6050_I2C_Stop Soft_I2C_Stop
#define MPU6050_I2C_Start Soft_I2C_Start
#else
#define MPU6050_I2C_Wr I2C1_Wr
#define MPU6050_I2C_Rd I2C1_Rd
#define MPU6050_I2C_Stop I2C1_Stop
#define MPU6050_I2C_Start I2C1_Start
#endif
#define MPU6050_ADDRESS 0xD0
#define MPU6050_RA_XG_OFFS_TC 0x00
#define MPU6050_RA_YG_OFFS_TC 0x01
#define MPU6050_RA_ZG_OFFS_TC 0x02
#define MPU6050_RA_X_FINE_GAIN 0x03
#define MPU6050_RA_Y_FINE_GAIN 0x04
#define MPU6050_RA_Z_FINE_GAIN 0x05
#define MPU6050_RA_XA_OFFS_H 0x06
#define MPU6050_RA_XA_OFFS_L_TC 0x07
#define MPU6050_RA_YA_OFFS_H 0x08
#define MPU6050_RA_YA_OFFS_L_TC 0x09
#define MPU6050_RA_ZA_OFFS_H 0x0A
#define MPU6050_RA_ZA_OFFS_L_TC 0x0B
#define MPU6050_RA_XG_OFFS_USRH 0x13
#define MPU6050_RA_XG_OFFS_USRL 0x14
#define MPU6050_RA_YG_OFFS_USRH 0x15
#define MPU6050_RA_YG_OFFS_USRL 0x16
#define MPU6050_RA_ZG_OFFS_USRH 0x17
#define MPU6050_RA_ZG_OFFS_USRL 0x18
#define MPU6050_RA_SMPLRT_DIV 0x19
#define MPU6050_RA_CONFIG 0x1A
#define MPU6050_RA_GYRO_CONFIG 0x1B
#define MPU6050_RA_ACCEL_CONFIG 0x1C
#define MPU6050_RA_FF_THR 0x1D
#define MPU6050_RA_FF_DUR 0x1E
#define MPU6050_RA_MOT_THR 0x1F
#define MPU6050_RA_MOT_DUR 0x20
#define MPU6050_RA_ZRMOT_THR 0x21
#define MPU6050_RA_ZRMOT_DUR 0x22
#define MPU6050_RA_FIFO_EN 0x23
#define MPU6050_RA_I2C_MST_CTRL 0x24
#define MPU6050_RA_I2C_SLV0_ADDR 0x25
#define MPU6050_RA_I2C_SLV0_REG 0x26
#define MPU6050_RA_I2C_SLV0_CTRL 0x27
#define MPU6050_RA_I2C_SLV1_ADDR 0x28
#define MPU6050_RA_I2C_SLV1_REG 0x29
#define MPU6050_RA_I2C_SLV1_CTRL 0x2A
#define MPU6050_RA_I2C_SLV2_ADDR 0x2B
#define MPU6050_RA_I2C_SLV2_REG 0x2C
#define MPU6050_RA_I2C_SLV2_CTRL 0x2D
#define MPU6050_RA_I2C_SLV3_ADDR 0x2E
#define MPU6050_RA_I2C_SLV3_REG 0x2F
#define MPU6050_RA_I2C_SLV3_CTRL 0x30
#define MPU6050_RA_I2C_SLV4_ADDR 0x31
#define MPU6050_RA_I2C_SLV4_REG 0x32
#define MPU6050_RA_I2C_SLV4_DO 0x33
#define MPU6050_RA_I2C_SLV4_CTRL 0x34
#define MPU6050_RA_I2C_SLV4_DI 0x35
#define MPU6050_RA_I2C_MST_STATUS 0x36
#define MPU6050_RA_INT_PIN_CFG 0x37
#define MPU6050_RA_INT_ENABLE 0x38
#define MPU6050_RA_DMP_INT_STATUS 0x39
#define MPU6050_RA_INT_STATUS 0x3A
#define MPU6050_RA_ACCEL_XOUT_H 0x3B
#define MPU6050_RA_ACCEL_XOUT_L 0x3C
#define MPU6050_RA_ACCEL_YOUT_H 0x3D
#define MPU6050_RA_ACCEL_YOUT_L 0x3E
#define MPU6050_RA_ACCEL_ZOUT_H 0x3F
#define MPU6050_RA_ACCEL_ZOUT_L 0x40
#define MPU6050_RA_TEMP_OUT_H 0x41
#define MPU6050_RA_TEMP_OUT_L 0x42
#define MPU6050_RA_GYRO_XOUT_H 0x43
#define MPU6050_RA_GYRO_XOUT_L 0x44
#define MPU6050_RA_GYRO_YOUT_H 0x45
#define MPU6050_RA_GYRO_YOUT_L 0x46
#define MPU6050_RA_GYRO_ZOUT_H 0x47
#define MPU6050_RA_GYRO_ZOUT_L 0x48
#define MPU6050_RA_EXT_SENS_DATA_00 0x49
#define MPU6050_RA_EXT_SENS_DATA_01 0x4A
#define MPU6050_RA_EXT_SENS_DATA_02 0x4B
#define MPU6050_RA_EXT_SENS_DATA_03 0x4C
#define MPU6050_RA_EXT_SENS_DATA_04 0x4D
#define MPU6050_RA_EXT_SENS_DATA_05 0x4E
#define MPU6050_RA_EXT_SENS_DATA_06 0x4F
#define MPU6050_RA_EXT_SENS_DATA_07 0x50
#define MPU6050_RA_EXT_SENS_DATA_08 0x51
#define MPU6050_RA_EXT_SENS_DATA_09 0x52
#define MPU6050_RA_EXT_SENS_DATA_10 0x53
#define MPU6050_RA_EXT_SENS_DATA_11 0x54
#define MPU6050_RA_EXT_SENS_DATA_12 0x55
#define MPU6050_RA_EXT_SENS_DATA_13 0x56
#define MPU6050_RA_EXT_SENS_DATA_14 0x57
#define MPU6050_RA_EXT_SENS_DATA_15 0x58
#define MPU6050_RA_EXT_SENS_DATA_16 0x59
#define MPU6050_RA_EXT_SENS_DATA_17 0x5A
#define MPU6050_RA_EXT_SENS_DATA_18 0x5B
#define MPU6050_RA_EXT_SENS_DATA_19 0x5C
#define MPU6050_RA_EXT_SENS_DATA_20 0x5D
#define MPU6050_RA_EXT_SENS_DATA_21 0x5E
#define MPU6050_RA_EXT_SENS_DATA_22 0x5F
#define MPU6050_RA_EXT_SENS_DATA_23 0x60
#define MPU6050_RA_MOT_DETECT_STATUS 0x61
#define MPU6050_RA_I2C_SLV0_DO 0x63
#define MPU6050_RA_I2C_SLV1_DO 0x64
#define MPU6050_RA_I2C_SLV2_DO 0x65
#define MPU6050_RA_I2C_SLV3_DO 0x66
#define MPU6050_RA_I2C_MST_DELAY_CTRL 0x67
#define MPU6050_RA_SIGNAL_PATH_RESET 0x68
#define MPU6050_RA_MOT_DETECT_CTRL 0x69
#define MPU6050_RA_USER_CTRL 0x6A
#define MPU6050_RA_PWR_MGMT_1 0x6B
#define MPU6050_RA_PWR_MGMT_2 0x6C
#define MPU6050_RA_BANK_SEL 0x6D
#define MPU6050_RA_MEM_START_ADDR 0x6E
#define MPU6050_RA_MEM_R_W 0x6F
#define MPU6050_RA_DMP_CFG_1 0x70
#define MPU6050_RA_DMP_CFG_2 0x71
#define MPU6050_RA_FIFO_COUNTH 0x72
#define MPU6050_RA_FIFO_COUNTL 0x73
#define MPU6050_RA_FIFO_R_W 0x74
#define MPU6050_RA_WHO_AM_I 0x75
typedef struct
{
struct
{
signed int X;
signed int Y;
signed int Z;
}Accel;
signed int Temperatura;
struct
{
signed int X;
signed int Y;
signed int Z;
}Gyro;
}MPU6050;
void MPU6050_Init()
{
MPU6050_I2C_Start();
MPU6050_I2C_Wr( MPU6050_ADDRESS );
MPU6050_I2C_Wr( MPU6050_RA_PWR_MGMT_1 );
MPU6050_I2C_Wr( 2 ); //Sleep OFF
MPU6050_I2C_Wr( 0 );
MPU6050_I2C_Stop();
MPU6050_I2C_Start();
MPU6050_I2C_Wr( MPU6050_ADDRESS );
MPU6050_I2C_Wr( MPU6050_RA_GYRO_CONFIG );
MPU6050_I2C_Wr( 0 ); //gyro_config, +-250 °/s
MPU6050_I2C_Wr( 0 ); //accel_config +-2g
MPU6050_I2C_Stop();
}
void MPU6050_Read( MPU6050 *Sensor )
{
MPU6050_I2C_Start();
MPU6050_I2C_Wr( MPU6050_ADDRESS );
MPU6050_I2C_Wr( MPU6050_RA_ACCEL_XOUT_H );
MPU6050_I2C_Start();
MPU6050_I2C_Wr( MPU6050_ADDRESS | 1 );
Sensor->Accel.X = ( MPU6050_I2C_Rd(1) << 8 ) | MPU6050_I2C_Rd(1);
Sensor->Accel.Y = ( MPU6050_I2C_Rd(1) << 8 ) | MPU6050_I2C_Rd(1);
Sensor->Accel.Z = ( MPU6050_I2C_Rd(1) << 8 ) | MPU6050_I2C_Rd(1);
Sensor->Temperatura = ( MPU6050_I2C_Rd(1) << 8 ) | MPU6050_I2C_Rd(1);
Sensor->Gyro.X = ( MPU6050_I2C_Rd(1) << 8 ) | MPU6050_I2C_Rd(1);
Sensor->Gyro.Y = ( MPU6050_I2C_Rd(1) << 8 ) | MPU6050_I2C_Rd(1);
Sensor->Gyro.Z = ( MPU6050_I2C_Rd(1) << 8 ) | MPU6050_I2C_Rd(0);
MPU6050_I2C_Stop();
Sensor->Temperatura += 12421;
Sensor->Temperatura /= 340;
}
EXEMPLO:
//Habilitar as seguintes bibliotecas:
// - Soft_I2C
// - Lcd
// - Conversions e C_String
#define USE_MPU6050_SOFT_I2C
//Copie e cole a biblioteca aqui!!
sbit MPU6050_Scl at RB6_Bit;
sbit MPU6050_Sda at RB7_Bit;
sbit MPU6050_Scl_Direction at TRISB6_Bit;
sbit MPU6050_Sda_Direction at TRISB7_Bit;
sbit LCD_RS at RB5_bit;
sbit LCD_EN at RB4_bit;
sbit LCD_D4 at RB3_bit;
sbit LCD_D5 at RB2_bit;
sbit LCD_D6 at RB1_bit;
sbit LCD_D7 at RB0_bit;
sbit LCD_RS_Direction at TRISB5_bit;
sbit LCD_EN_Direction at TRISB4_bit;
sbit LCD_D4_Direction at TRISB3_bit;
sbit LCD_D5_Direction at TRISB2_bit;
sbit LCD_D6_Direction at TRISB1_bit;
sbit LCD_D7_Direction at TRISB0_bit;
MPU6050 Sensor;
char msg[12];
void main()
{
CMCON = 7;
Lcd_Init();
Lcd_Cmd( _LCD_CURSOR_OFF );
Soft_I2C_Init();
MPU6050_Init();
while(1)
{
MPU6050_Read( &Sensor );
IntToStr( Sensor.Gyro.X, msg );
Lcd_Out( 1, 1, msg );
IntToStr( Sensor.Gyro.Y, msg );
Lcd_Out( 1, 8, msg );
IntToStr( Sensor.Gyro.Z, msg );
Lcd_Out( 2, 1, msg );
Delay_ms( 500 );
}
}

please can you give me MPU6050 proteus library
ResponderExcluirPara quem possa me ajudar: Para finalidade de escolha do PIC (o mais barato possivel) o SDA pode ser ligado a qualquer pino I/O digital? e quanto ao SCL? o PIC envia um clock para o SCL?
ResponderExcluirSe voce utilizar a biblioteca Soft_I2C do MikroC que emula uma comunicação I2C, você poderá escolher qualquer PIC. Caso contrário, você deve escolher o PIC que possui um módulo I2C internamente.
ExcluirTiago vc tem um exemplo de como obter as leituras do MPU6050 com um PIC que possui I2C, como o 18F2550. Desde já obrigado.
ExcluirComo faço para adquirir essa biblioteca Soft_I2C ???
ResponderExcluirVem junto com o compilador MikroC.
Excluirolá eu consegui ajeitar a biblioteca I2C ao código mas não entendi a Soft_SPI...ela é necessária? ta dando o seguinte erro:
ResponderExcluir0 1 mikroCPIC1618.exe -MSF -DBG -pP16F676 -DL -O11111114 -fo4 -N"C:\MPU6050\MPU6050.mcppi" -SP"C:\Program Files (x86)\mikroC PRO for PIC\Defs\" -SP"C:\Program Files (x86)\mikroC PRO for PIC\Uses\P16\" -SP"C:\MPU6050\" "MPU6050.c" "__Lib_Math.mcl" "__Lib_MathDouble.mcl" "__Lib_System.mcl" "__Lib_Delays.mcl" "__Lib_CString.mcl" "__Lib_Conversions.mcl" "__Lib_SoftI2C.mcl" "__Lib_SoftSPI.mcl" "__Lib_LcdConsts.mcl" "__Lib_Lcd.mcl"
0 1139 Available RAM: 48 [bytes], Available ROM: 1024 [bytes]
0 122 Compilation Started MPU6050.c
234 123 Compiled Successfully MPU6050.c
0 127 All files Compiled in 47 ms
0 360 Unresolved extern 'SoftSpi_SDI_Direction' __Lib_SoftSPI.c
0 360 Unresolved extern 'SoftSpi_SDO_Direction' __Lib_SoftSPI.c
0 360 Unresolved extern 'SoftSpi_CLK_Direction' __Lib_SoftSPI.c
0 360 Unresolved extern 'SoftSpi_SDI' __Lib_SoftSPI.c
0 360 Unresolved extern 'SoftSpi_SDO' __Lib_SoftSPI.c
0 360 Unresolved extern 'SoftSpi_CLK' __Lib_SoftSPI.c
0 102 Finished (with errors): 26 set 2015, 00:05:00 MPU6050.mcppi
Olá!
ExcluirMil desculpas...Soft_SPI não é necessário, sei lá porque eu coloquei kkkk.
Tranquilo cara. Mesmo eu li em algum lugar que o mpu6050 se comunica com spi mas tendo o i2c é tranquilo. ..Obrigado por postar!
ExcluirTranquilo cara. Mesmo eu li em algum lugar que o mpu6050 se comunica com spi mas tendo o i2c é tranquilo. ..Obrigado por postar!
ExcluirEai, cara, tu poderia me ajudar a arrumar a biblioteca do mpu? Pois aqui quando entra no while não aparece mais nada no lcd.
Excluirpodrias pasarme la libreria del MPU6050 para proteus
ResponderExcluirÑO
Excluirhow to fix unresolved extern 'Soft_I2C_Sda' , 'Soft_I2C_Sda_Direction' , 'Soft_I2C_Scl', 'Soft_I2C_Scl_Direction' and 'Soft_I2C_Sd'
ResponderExcluirNão consegui configurar o I2c, esta dando esses erros:
ResponderExcluir0 360 Unresolved extern 'Soft_I2C_Scl_Direction' __Lib_SoftI2C.c
0 360 Unresolved extern 'Soft_I2C_Sda_Direction' __Lib_SoftI2C.c
0 360 Unresolved extern 'Soft_I2C_Scl' __Lib_SoftI2C.c
sabe me informar o erro ?
O meu esta dando o mesmo erro. Vc conseguiu resolver?
ExcluirApenas colocar no programa essas definições:
Excluir// Software I2C connections
sbit Soft_I2C_Scl at RB6_bit;
sbit Soft_I2C_Sda at RB7_bit;
sbit Soft_I2C_Scl_Direction at TRISB6_bit;
sbit Soft_I2C_Sda_Direction at TRISB7_bit;
// End Software I2C connections
Ola. Alguem conseguiu implementar esse codigo no mikroC sem dar erro? Se conseguiu poderia dar uma força!! Estou precisando terminar um trabalho mas esta dando erro. Obrigado
ResponderExcluirAmigo, você tem algum exemplo, ou poderia me explicar como eu posso utilizar dois mpu 6050 ao mesmo tempo?
ResponderExcluirNo meu compilou sem dar erros, porém o giroscópio e o acelerômetro não medem certo
ResponderExcluirAlguém tem a biblioteca do MPU6050 para o proteus?
ResponderExcluirEu consegui ler os valores, porém não está estável, parado ele envia diferentes valores e muito destintos, alguém tem uma solução?
ResponderExcluiris it possible to give us the library of all sensor like mpu6050?
ResponderExcluirQueria essa biblioteca da MPU6050 para simular no proteus !
ResponderExcluirAlguém tem o link para download ?
tambem preciso...
Excluir